Mom-robot creates a robot children to study artificial evolution
When you create a completely new robot, a sensible idea is to test his logic, to watch the behavior of the algorithm as well-made. But even with a perfect imitation of the robot hardly show you how it will behave, if you build the full version. As we have seen, even the most complex simulations do not always reflect the future behavior of the robot in the real world.
This fundamental gap between simulation and reality becomes especially problematic when you’re dealing with robotics, which is impractical to build a physical version of everything that is being developed. Evolutionary Robotics – is a very good example of where design is tested by introducing robot behaviors for hundreds and even thousands of generations. In a virtual environment, it works fine, but in practice many times more difficult. However, with things like the evolution of robotics, we are back to the original question, which is that the development of the robot, works perfectly in a simulation runs completely wrong in the real world. This also calls into question the value of the iteration in the robot during simulation in general.
In an article published PLOS ONE last week, Lucius Brodbeck, Simon Hauser and Fumiya Ida from the Institute of Robotics and Intelligent Systems ETH Zurich, have taken another step forward, teach “the robot mom” automatically build a “child-robot” from predetermined components to see how they move, simulating the evolution of heavy robots without any compromises.
The basic idea of evolutionary robotics is to build a heap of simple robots, carrying out specific tests on them, the allocation of some of the most promising species and study their structures to play in a new generation. It works and biological evolution (survival of the fittest and all that), and the fact that you’re sitting there reading this, can serve as a worthy proof of that. For those of us who do not have time to wait for eons, the robots can be forced to evolve much faster, since you are only interested in one aspect of the behavior of the robot and the existence of an extremely primitive.
This arm UR5, “Mom Robot” (he referred to in the document), which is building a locomotive agents (what can be called “child-robot”) of standardized parts, including active cubes with a rotating face, and passive wood . Mom-robot glues active and passive blocks together and then transfers them to the test zone where they are remotely activated and are under the supervision of the camera.
Once the assessment is made, the children robots understand (yet manually) by removing the hot glue, and the components are returned to the conveyor to create new robots. Meanwhile, the “distinguished” from the point of view individuals (those that progressed furthest faster than the other), they go for the next round without changes. The system also is mutated and folds to create an elite individuals of the next generation.
To understand how selection and mutation robots fashionable to compare it with the theory of genes. The design of each robot can be described by the genome, consisting of 1-5 genes, where each gene describes the characteristics of the modules that make child robot, including its “brain” (in the form of parameters of motor commands). The child who is created on the video above has three genes, each gene and includes information about how the module is focused and where it is attached to the previous module.
If the mutation happens to one of three things: the genome “elitnika” or the entire gene is dialed at random, either the entire gene is random, or one of the existing option gene changes randomly. Therefore, in the context of the robot, which was built in the first video, he could receive another module adhered somewhere (Appendix gene) could have lost one of the three modules (deletion of the gene), or one of the modules can be attached to the left side, instead of the right (changing parameters of existing genes).
Crossover (breeding) elite robots a little easier than the mutation, two elite robot parents share genes exactly in half, and the first few genes are attached to the first parent of the last few genes of the other parent. This can lead to some oddities because the mutation is preferable crossover. After the calculation of all mutations and crossovers, mother robot builds a new generation tests it and repeats the evolutionary process again.
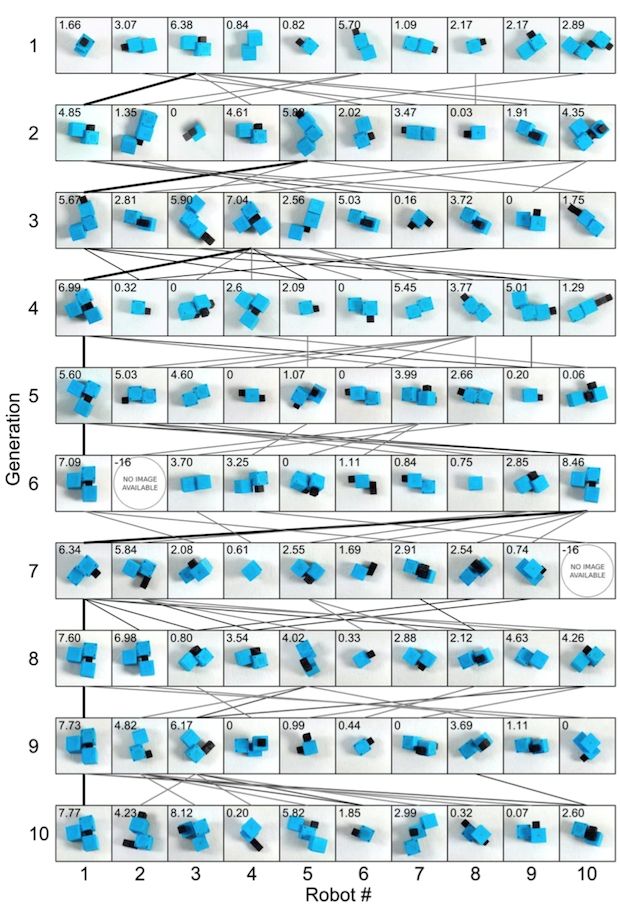
Researchers conducted five experiments, 10 of 10 generations of robots each. The illustration above shows each robot experiment №2. Each thumbnail is a plan view at the beginning of the evaluation. The number in the upper right corner of each picture indicates its suitability. The lines between the pictures show used to generate a new genotype method (thick black – the elite, slim black – crossover; a thin gray – mutation). Negative survival and absence of image point to the failure of the process of building the appropriate robot. The images show that various types of robots have been tested, and their suitability increased during the experiment.
This is a fairly complicated series of photographs showing one of the five experiments, where 10 generations of robots have been designed, evolved and improved. It is often found a significant difference even between elite generation of robots, apparently due to the fact that many members were unstable sometimes quite well, and sometimes not cope (picture below).
As you can see, the elite is not always good manifests itself in repeated test, even with the same design. The researchers explained the absence of re-test generation that such inconsistency is part of the evolutionary process.
“There are significant variations in the behavior of some agents, even with an identical genome, which is the reason why the elite sometimes produces similar results in subsequent generations. On the other hand, it turns out that even without a few tests, it was found that the evolutionary pressure has a tendency to choose more of all successive generations, and usually repeated genome persists for generations. That is why we maintain the current sequence of the experiment. After all, should be considered in the direction of survival, so that there are no exact duplicate testing will not affect the overall picture of what we are trying to understand a physical evolution of the robot. ”
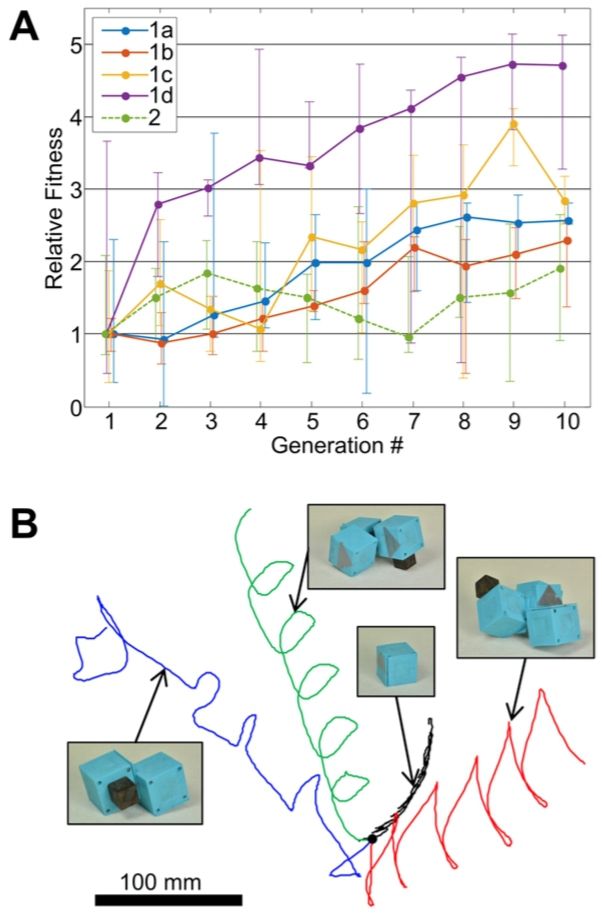
In all experiments, endurance generation depends on the initial (A). This means that the evolutionary process is applied to the initial population of robots increases their ability to move. Top view of the trajectory of four successful robotic experiments 1A, 1C and 2 shows that there are different strategies of movement (B). At that time, the most successful solutions provide a stable limit cycle, as well as more non-standard behavior (blue) can achieve higher performance.
In general, “observed increase in survival by more than 40% in 10 generations in all experiments,” which is very good, but the impressive part is that it’s from a physical point of view: all the robots were built and tested, because you know that your design is really an elite elite, and will behave well in what turned out to be no application to this little robot consists of several cubes.
Does this mean the end of the evolutionary modeling of robots? Absolutely no, and researchers can specify that their methods are likely to begin to work even better in combination with the simulation.
The demonstrations show the evolution of the physical possibilities of model-free system. Validation is a physical robot that brings the real data in a laborious process. Simulation, on the other hand, can test more decisions in a shorter period of time. Therefore, it would be interesting to combine both methods, instead of using only one extreme simulation or actual testing. The simulation can, for example, be used for pre-selection of promising candidates for the real tests, reducing the time spent on solutions with low or no chance of success.



